Secara umum, keamatan penyinaran laser adalah Gaussian, dan dalam proses penggunaan laser, sistem optik biasanya digunakan untuk mengubah pancaran dengan sewajarnya.
Berbeza daripada teori linear optik geometri, teori transformasi optik pancaran Gaussian adalah tak linear, yang berkait rapat dengan parameter pancaran laser itu sendiri dan kedudukan relatif sistem optik.
Terdapat banyak parameter untuk menggambarkan pancaran laser Gaussian, tetapi hubungan antara jejari titik dan kedudukan pinggang rasuk sering digunakan dalam menyelesaikan masalah praktikal. Iaitu, jejari pinggang rasuk kejadian (ω1) dan jarak sistem transformasi optik (z1) diketahui, dan kemudian jejari pinggang rasuk yang diubah (ω2), kedudukan pinggang rasuk (z2) dan jejari titik (ω3) pada sebarang jawatan (z) diperolehi. Fokus pada kanta, dan pilih kedudukan pinggang depan dan belakang kanta sebagai satah rujukan 1 dan satah rujukan 2 masing-masing, seperti ditunjukkan dalam Rajah 1.
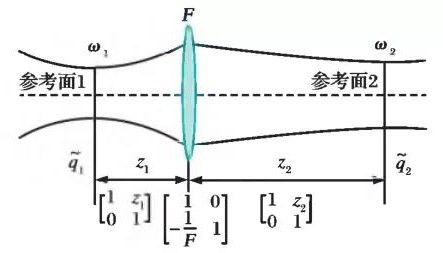
Rajah 1 Transformasi Gauss melalui kanta nipis
Mengikut parameter q teori pancaran Gaussian, the q1 dan q2 pada dua satah rujukan boleh dinyatakan sebagai:
Dalam formula di atas: The fe1 dan fe2 masing-masing adalah parameter fokus sebelum dan selepas transformasi rasuk Gaussian. Selepas rasuk Gaussian melalui ruang bebas z1, kanta nipis dengan jarak fokus F dan ruang kosong z2, mengikut ABCD teori matriks penghantaran, berikut boleh diperolehi:

Sementara itu, q1 dan q2 memenuhi hubungan berikut:

Dengan menggabungkan formula di atas dan membuat bahagian nyata dan khayalan pada kedua-dua hujung persamaan masing-masing, kita boleh mendapatkan:
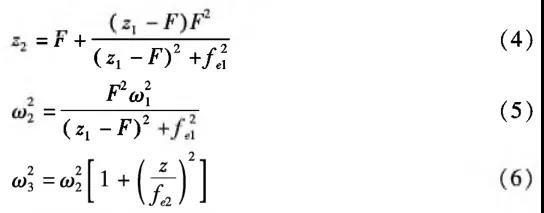
Persamaan (4) – (6) ialah hubungan transformasi antara kedudukan pinggang dan saiz titik pancaran Gaussian selepas melalui kanta nipis.
Masa siaran: 27 Ogos 2021